
Introduction
Dans cet article nous allons paramétrer le GPS Rescue spécifiquement pour le vol long range. Nous allons passer en revue les différentes options de base puis en adapter certaines à l’utilisation pour le long range.
Ce tutoriel concerne les versions de 4.1 à 4.3 de Betaflight. Si vous voulez encore plus de détails sur les fonctions du gps rescue, consultez la page Github du projet.
Concernant Betaflight 4.4, le gps rescue a été amélioré dans la gestion de l’altitude, la vitesse, la précision de la trajectoire de vol et le comportement lors de l’atterrissage. Découvrez en détail les changements apportés en consultant la page Github dédiée au gps rescue pour Betaflight 4.4.
Le gps rescue reste une fonction expérimentale qui n’est pas véritablement une fonction Return To Home dont sont équipé les drones tout publics. Lors de son activation suite une perte de la liaison radio ou vidéo, le quad va retourner vers son point de décollage, selon des paramètres définis par l’utilisateur, puis ce dernier va reprendre la main une fois que la liaison radio ou vidéo est rétablie.
Dans tous les cas le gps rescue ne doit jamais être activé si la direction vers le point décollage, symbolisée par une flèche dans l’OSD, indique une mauvaise direction, au risque de faire un fly away !
Calibrer l’accéléromètre
Le gps rescue utilise l’accéléromètre, donc assurez vous qu’il soit activé dans l’onglet Configuration de Betaflight et parfaitement fonctionnel via l’utilisation du mode Angle durant un vol test, ou le drone doit bien garder son assiette horizontale quand vous ne touchez pas les sticks.
Paramétrer le récepteur GPS
Après vous être assuré que l’accéléromètre fonctionne parfaitement, allez dans l’onglet Ports, dans l’UART où est branché votre module GPS sélectionnez GPS dans Entrée Capteur puis le baudrate approprié. Consultez les données du fabriquant de votre GPS pour connaitre la valeur du baudrate à sélectionner. Dans le cas présent, mon GPS est un SAM-M8Q de chez Matek, connecté sur l’UART 2 et le baudrate par défaut est de 9600.

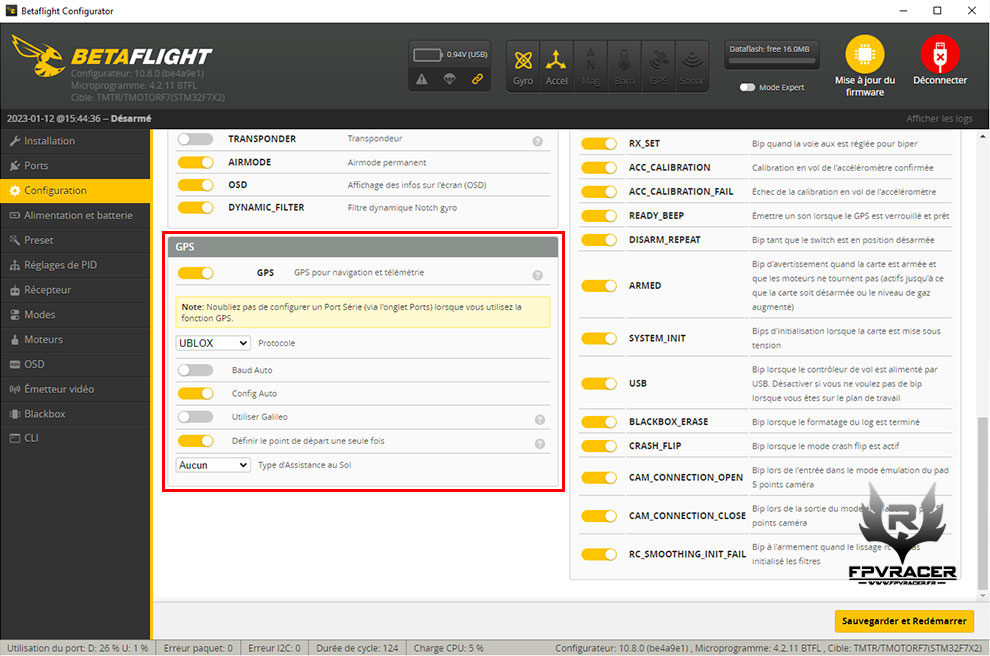
Dans l’onglet Configuration, activer le GPS, puis en fonction des données du fabriquant sélectionnez le protocole adéquat, activez la Config Auto ainsi que Utilisez Galileo si votre GPS le supporte.
Activez Définir le point de départ une seule fois, afin de vous assurer que votre drone retourne bien à son point de départ et non vers un autre endroit où vous l’auriez désarmé et réarmé pour redécoller, suite à un crash par exemple.
Activer le GPS Rescue lors d’un failsafe
Activez le Mode Expert pour afficher l’onglet Failsafe, puis activez Sauvetage GPS
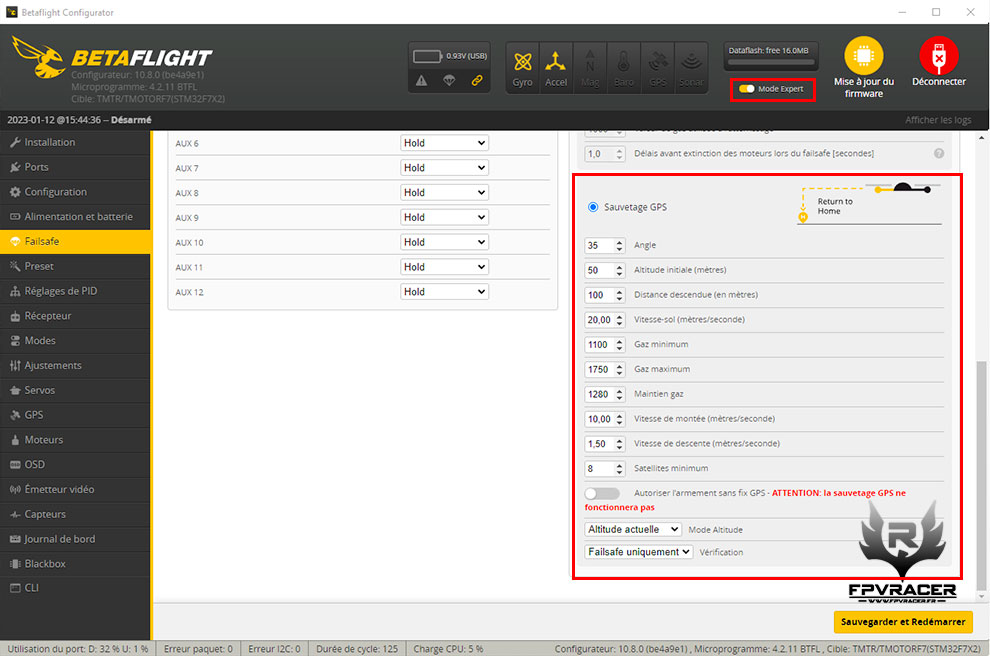
Détaillons chaque fonctionnalités du Failsafe GPS Rescue :
Angle
Angle maximal d’inclinaison de votre drone après avoir activé le GPS Rescue. Si vous faites du long range en montagne avec un vent fort, augmentez cet angle à 45° afin d’être sûr de revenir vers votre position.
Altitude initiale
Hauteur que prendra votre drone par rapport à son altitude à laquelle il se trouvait à son point de décollage. Si le GPS rescue est activé à une altitude supérieure à celle du décollage + la valeur de hauteur renseignée, alors il montera à l’altitude maximale enregistrée durant le vol + 15 mètres. Cette fonctionnalité est très importante pour éviter les obstacles lors du retour vers le point de décollage.
Distance descendue
Distance en mètres entre le drone et son point de décollage, à laquelle il va commencer à descendre. Personnellement je divise la valeur d’origine par 2 soit 100 mètres.
Vitesse sol
Vitesse en mètres par seconde a laquelle le drone va revenir vers son point de décollage.
Gaz minimum
Gaz minimum durant le GPS Rescue. Assurez-vous que cette valeur corresponde à la valeur minimum donnée dans l’onglet Moteurs (durant un test sans hélices), où les moteurs tournent sans accros.
Gaz maximum
Gaz maximum durant le GPS Rescue. Assurez-vous que cette valeur corresponde à celle donnée dans l’onglet Moteurs (durant un test sans hélices), où les moteurs atteignent les gaz maximum.
Maintient gaz
Valeur de gaz nécessaire pour que vos moteurs puissent maintenir votre drone dans les airs. Faites un vol test et relevez dans l’OSD le pourcentage de gaz auquel votre drone tient sa position en vol stationnaire. Puis dans l’onglet Moteurs de Betaflight, reproduisez ce pourcentage de gaz (cette fois ci sans hélices, merci vos doigts) pour connaitre cette valeur.
Vitesse de montée
Vitesse en mètres par seconde à laquelle le drone va monter lors de l’activation du GPS Rescue. Si vous faites du long range en montagne, montez la valeur à 10 m/s afin de vous extraire plus rapidement des obstacles environnants. Attention toutefois à ne pas pousser trop haut cette valeur si vous utilisez des li-ion qui ne pourraient pas encaisser la décharge et conduire au crash.
Si vous ne volez pas à proximité d’obstacles, la valeur par défaut de 5 m/s conviendra.
Vitesse de descente
Vitesse en mètres par seconde à laquelle le drone va descendre vers son point de décollage.
Satellites minimum
Pour élaborer une position à 3 dimensions, votre GPS doit recevoir au minimum le signal de 4 satellites. Afin d’améliorer sa précision, il est recommandés d’en utiliser au moins 8.
Méfiez vous des sources électromagnétiques telles que les pylônes électriques, les lignes à haute tension, les antennes radar et autres qui peuvent être source de perturbation du signal GPS.
Autoriser l’armement sans fix GPS
Activez seulement cette fonction si vous décollez d’un lieu où vous ne captez pas de satellites, au fond d’un canyon par exemple, ou si vous pratiquez du bando.
Attention, une fois activée cette fonction désactive le GPS Rescue !
Mode altitude
Il est d’usage d’utiliser Altitude maximale, cependant je vous le déconseille si vous pratiquez du long range en montagne. En effet imaginez que vous décoller à 500 mètres d’altitude puis que vous montiez en haut d’une montagne à 1500 m d’altitude et que lors de votre retour le GPS Rescue s’active à 500 m d’altitude. Et bien le quad va remonter à 1500 m d’altitude + la hauteur de la valeur de l’Altitude initiale pour revenir vers vous.
Vous allez consommer inutilement le peu de ressources que contenait encore votre batterie et là c’est le crash assuré.
Donc dans le cas ou vous pratiquez du long range en montagne, ou que volez sur un site avec des dénivelés importants, sélectionnez Altitude actuelle.
Vérification
En sélectionnant Failsafe uniquement, le GPS Rescue fera ses vérifications d’usage (sanity cheks) avant de s’activer en cas de failsafe.
Les sanity cheks sont :
- Le récepteur GPS est connecté à la FC
- Le récepteur GPS envoie une position GPS valide
- Le quad n’a pas eu de crash
- Le nombre de satellites est égal ou supérieur au nombres de satellites indiqué dans Satellites minimum
- Le quad se rapproche du point d’origine après avoir atteint l’Altitude initiale
Si l’une des ces conditions n’est pas remplie lors du failsafe, alors le GPS Rescue ne pourra pas s’activer.
Paramètres supplémentaires du GPS Rescue
Allez dans l’onglet CLI de Betaflight et tapez :
get gpsLes paramètres complets du GPS Rescue font s’afficher.

Pour du long range en montagne, nous allons changer la vitesse à laquelle le quad va pivoter sur le yaw avant de prendre de l’altitude. En effet si le quad est trop lent pour pivoter en direction de son point de décollage, il risque de continuer à dériver et d’heurter un obstacle à proximité, comme un arbre par exemple.
C’est pourquoi nous allons augmenter la vitesse de rotation à 100 sur le yaw qui est par défaut à 40.
Tapez :
set gps_rescue_yaw_p = 100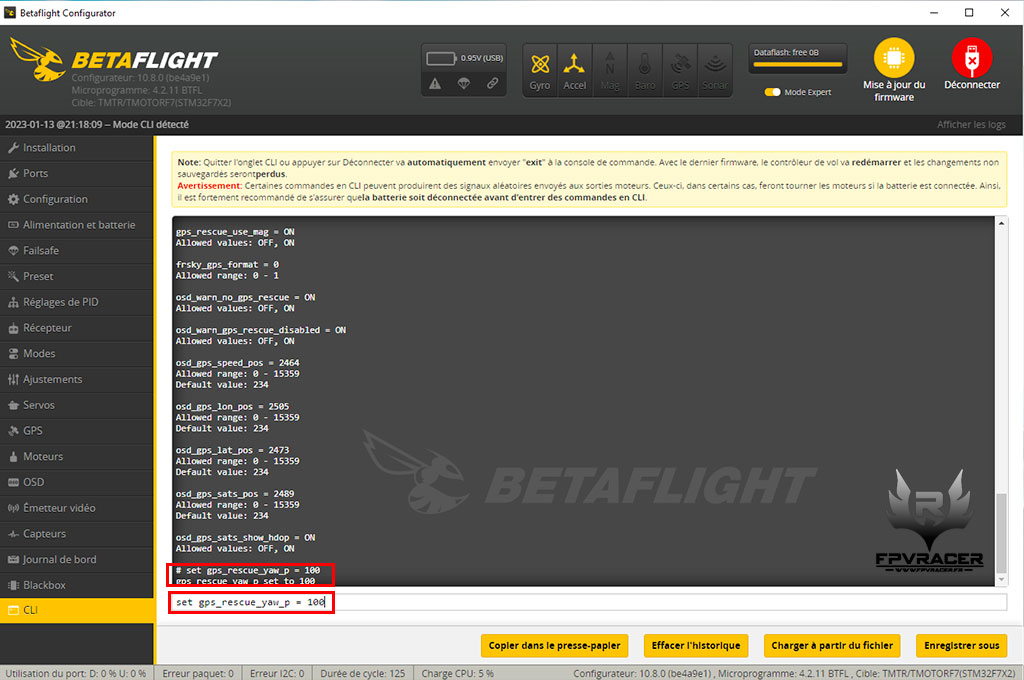
Vous pouvez aussi réduire la distance minimum à laquelle le GPS Rescue peut être activé en modifiant la valeur de gps_rescue_min_dth. Par défaut cette valeur est de 100 mètres.
Pour réduire cette valeur à 50 mètres tapez :
gps_rescue_min_dth = 50
Attribuer un interrupteur de la radio au GPS Rescue
Dans l’onglet Modes de Betaflight Suivez la procédure classique pour attribuer un interrupteur au GPS Rescue sur une voie libre.

Choisissez un interrupteur à 3 positions afin d’activer le « mod » pré GPS Rescue que nous allons voir plus bas dans Créer un « mod » pré GPS Rescue.
Assurez vous que le mode Angle soit aussi actif quand le GPS Rescue est activé.
Votre interrupteur a donc 3 positions comme ceci :
- position 0 : rien d’activé
- position 1 : mode Angle activé
- position 2 : mode Angle et GPS Rescue activé
Tester le GPS Rescue en conditions réelles
- Faites un vol d’essai. Décollez après vous être assuré que vous avez le minimum de satellites requis pour activer le GPS Rescue (gps_rescue_min_sats).
- Allez tout droit à une distance de 100 mètres (gps_rescue_min_dth) plus la Distance descendue de 100 mètres (gps_rescue_descent_dist) soit 200 mètres.
- Assurez vous que la flèche dans l’OSD indique bien la direction du point de décollage.
- Activez le GPS Rescue via votre interrupteur dédié.
- A ce moment le quad doit pivoter dans votre direction, prendre de la hauteur et revenir vers vous pour commencer à descendre. Lors de sa descente, reprenez la main en désactivant le GPS Rescue via son interrupteur.
- Recommencez la procédure depuis le début en partant dans d’autres directions, pour voir si le GPS Rescue fonctionne correctement.
- Dernier test pour vérifier si le GPS Rescue s’active lors d’un failsafe, recommencez la procédure puis au lieu d’activer le GPS Rescue via son interrupteur, éteignez votre radio, ce qui va provoquer un fail safe. Si tout va bien le GPS Rescue va prendre le relai et votre quad va revenir vers vous.
Note : Lors d’un gps rescue activé par un failsafe, pour reprendre la main il vous suffira d’agir sur n’importe quel stick en appliquant une pression supérieure à la valeur du paramètre failsafe_stick_threshold. Par défaut cette valeur est de 30%.
Créer un « mod » pré GPS Rescue
Il s’agit simplement d’activer le mode Angle et de prendre de la hauteur pour tenter de reprendre la main avant en dernier recours d’activer le GPS Rescue, en cas de perte de la liaison vidéo par exemple.
Attribuez le mode de vol Angle à votre interrupteur à trois positions où vous avez assigné le GPS Rescue. Faites le de manière à ce que vous activez le mode Angle avant d’activer le GPS Rescue.

Pour rappel votre interrupteur a 3 positions comme ceci :
- position 0 : rien d’activé
- position 1 : mode Angle activé
- position 2 : mode Angle et GPS Rescue activé
En cours de vol, si vous perdez la liaison vidéo, activez le mode Angle et mettez des gaz pour prendre de la hauteur. Le quad va se stabiliser et monter dans les airs pour s’extraire des obstacles qui ont rompu le signal vidéo.
Si la liaison se rétablie, vous pouvez continuer votre vol sans avoir eu le besoin d’activer le GPS Rescue.
Si au bout de quelques secondes (moins de 5 secondes) la liaison vidéo ne s’est pas rétablie, activez le GPS Rescue.
Entrainez vous à activer le mode Angle et le GPS Rescue régulièrement afin de ne pas être pris au dépourvu en cas de perte de liaison radio ou vidéo.
Cela vous aidera à gérer ce genre de situation avec beaucoup moins de stress et augmentera grandement vos chances de ramener votre quad à bon port.
Découvrez les tutos fpvracer ou les autres articles du blog !
2 Responses
Si ce tutoriel vous a été utile, que vous avez des remarques ou que vous voulez apporter une précision, merci de laisser un commentaire.
Merci pour l’article super bien expliqué 😉